





✔В Германии создали бионических робопчёл размером с голубя — они способны летать роем - «Новости сети»
Немецкая компания Festo сообщила о создании летающего робота по подобию пчелы. Подобно обычным пчёлам, робопчёл научили летать роем без столкновений друг с другом и препятствиями. В компании считают, что работа по подобным проектам принесёт много нового в робототехнику и позволит позаимствовать у природы множество рабочих решений.

Источник изображений: Festo
Основной вид деятельности компании Festo — это производство промышленного оборудования. Около 15 лет назад проектное подразделение компании занялось изучением и созданием бионических механизмов. В активе разработчиков робот-муравей, робострекоза, робот-бабочка, робопаук, летучая лисица и что-то ещё. На примере этих механизмов инженеры изучали и приспосабливали к ним особенности движения и полёта живых существ. Робопчела стала последней разработкой, в ходе которой впервые был реализован механизм полёта в рое.
Конструкцию робопчелы BionicBee в виде орнитоптера (махолёта) с двумя маховыми крыльями помогал проектировать ИИ на основе генеративных алгоритмов. За счёт этого удалось максимально облегчить конструкцию. Вес BionicBee составил 34 грамма при длине корпуса 22 см и размахе крыльев 24 см. Частота взмахов может меняться от 15 до 20 раз в секунду. Эту работу выполняет бесщёточный электродвигатель. Отдельно три сервомотора у основания каждого крыла меняют их геометрию, чтобы создавать подъёмную силу в нужное время и в нужном месте.
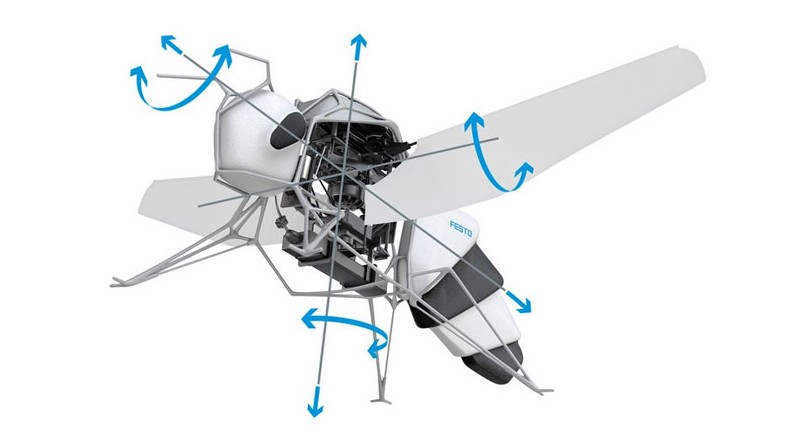
Регулируя наклоны и геометрию крыльев, инженеры заставляют робопчелу лететь вперёд, делать развороты в обе стороны или кружить на месте, а также менять высоту полёта. Собственно, точную траекторию полёта задаёт центральный компьютер, а поскольку все робопчёлы создаются вручную и имеют разброс характеристик, каждая из них проходит автокалибровку. После калибровки робопчёлами можно управлять как унифицированными единицами, не заботясь о том, что одна может быть тяжелее, другая легче, а у третьей чуть другие крылья.

Система полёта робопчёл в рое строится на системе широкополосных маяков (UWB). В специальном помещении установлено два уровня маяков, по временным меткам которых робопчёлы определяют своё место в пространстве и в рое. Система учитывает множество факторов, включая турбулентность от махов крыльями соседок в рое. Для инженеров Festo это был ценный опыт по созданию роботизированной летающей единицы и организации согласованного полёта группы таких единиц. Когда-нибудь этот опыт пригодится для разработки ещё более продвинутых бионических и роящихся автоматов.