Корпорация Mitsubishi Electric начала полевые испытания первой в мире технологии автономного вождения с использованием данных квази-зенитной спутниковой системы (QZSS).
В настоящее время точность позиционирования с помощью спутниковых систем находится в диапазоне нескольких метров. Это связано с рядом факторов, в частности, с нестабильностью бортовых часов и смещениями спутников. Кроме того, влияние оказывают локальные внешние воздействия, такие как ионосферные и тропосферные задержки сигналов.
Новое решение Mitsubishi Electric позволяет повысить точность позиционирования самоуправляемых автомобилей до нескольких сантиметров. Предложенная технология основана на использовании сигналов дифференциальной коррекции сантиметрового уровня точности (CLAS), передаваемых квази-зенитной спутниковой системой.
Платформа повышает точность позиционирования за счёт использования данных дифференциальной коррекции, которые поступают от сети постоянно действующих референсных станций. Через квази-зенитную спутниковую систему эти данные передаются на установленные на автомобилях высокоточные навигационные приёмники, которые могут определить местоположение с минимальной погрешностью.
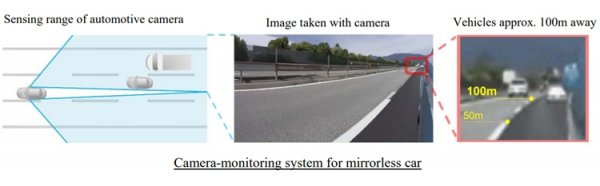
Дорожные испытания будут проведены с целью проверки возможности автономного движения при использовании сигналов CLAS и высокоточных 3D-карт в сочетании с разработками Mitsubishi Electric в области систем интеллектуального вождения, такими как сенсорные технологии на основе радара и камеры миллиметрового диапазона.
Корпорация Mitsubishi Electric начала полевые испытания первой в мире технологии автономного вождения с использованием данных квази-зенитной спутниковой системы (QZSS). В настоящее время точность позиционирования с помощью спутниковых систем находится в диапазоне нескольких метров. Это связано с рядом факторов, в частности, с нестабильностью бортовых часов и смещениями спутников. Кроме того, влияние оказывают локальные внешние воздействия, такие как ионосферные и тропосферные задержки сигналов. Новое решение Mitsubishi Electric позволяет повысить точность позиционирования самоуправляемых автомобилей до нескольких сантиметров. Предложенная технология основана на использовании сигналов дифференциальной коррекции сантиметрового уровня точности (CLAS), передаваемых квази-зенитной спутниковой системой. Платформа повышает точность позиционирования за счёт использования данных дифференциальной коррекции, которые поступают от сети постоянно действующих референсных станций. Через квази-зенитную спутниковую систему эти данные передаются на установленные на автомобилях высокоточные навигационные приёмники, которые могут определить местоположение с минимальной погрешностью. Дорожные испытания будут проведены с целью проверки возможности автономного движения при использовании сигналов CLAS и высокоточных 3D-карт в сочетании с разработками Mitsubishi Electric в области систем интеллектуального вождения, такими как сенсорные технологии на основе радара и камеры миллиметрового диапазона.